
Intelligente Batterie-Satz-Versammlungs-Ausrüstungs-elektrische Zellumreifungsmaschine
1. Entwurfsanforderungen der elektrische Zellumreifungsmaschine:
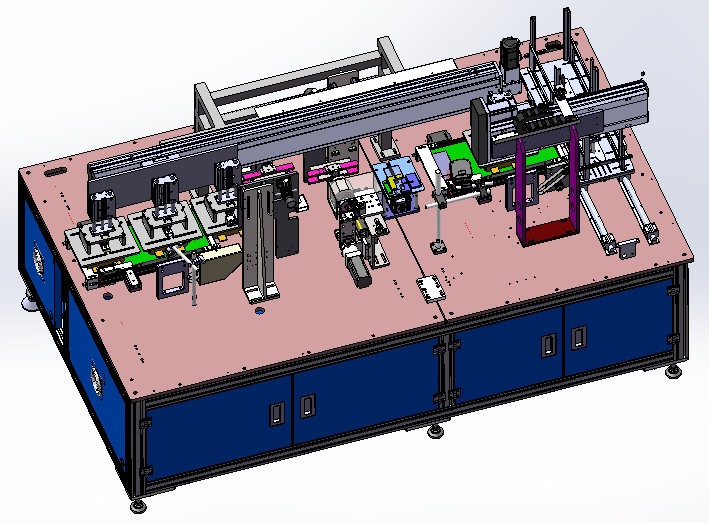
1.1. Die Ausrüstung basiert auf den Prozessentwurfsanforderungen der Batterieumreifungsmaschine, und die intelligente automatische Umreifungsmaschine der Batterie ist basiert auf dem Entwurf der Industrie 4,0 hergestelltes. Die Fertigungsstraße umfasst: Schaltgetriebe, Fütterungsmanipulator, Station stapelnd und in Position bringen und rollen Stellung, Sprühposition und Feuerlöschleitung zusammen
1.3. Nutzungsbedingungen:
1.3.1 Stromversorgungszustände: Hauptstromversorgung: 220V±15%
Druckluft 1.3.2: ≥ 0.5mpa, 10L/30Min
1.3.3 umgebende Temperatur: 0℃ | 40℃.
relative Luftfeuchtigkeit 1.3.4: 10 | 60%RH
1.4. Produktionsanforderungen:
1.4.1 Auftrittanforderungen:
1.4.1.1-einheitliches Erscheinungsbild, keine Deformation;
1.4.1.2 kein Splintloch, Flusskennzeichen oder andere Defekte;
1.4.2 Größenanforderungen:
1.4.2.1. Produktbreite 35-100mm.
1.4.2.2-Produktlänge: 50-150mm
1.4.2.3-ProduktWandstärke: 3.8-12mm
Barcode mit 1.4.3 Batterien
1.4.3.1. Auf der Front benutzen Sie den Laser Druck-qr Code oder kleben Sie den Barcode
1.5. Leistungsanforderungen der Batterieumreifungsmaschine:
Anforderungen, unter normaler Produktion getroffen zu werden bedingt; Mechanismus, stabiler und zuverlässiger, einfacher Operation des Schaltgetriebes, des Stellmechanismus, des Schleifenmechanismus, des verbindlichen Mechanismus, des Manipulator; Alle beweglichen Teile sollten angemessenes haben, zuverlässig, einfach, Schmierungsmechanismus zu benützen.
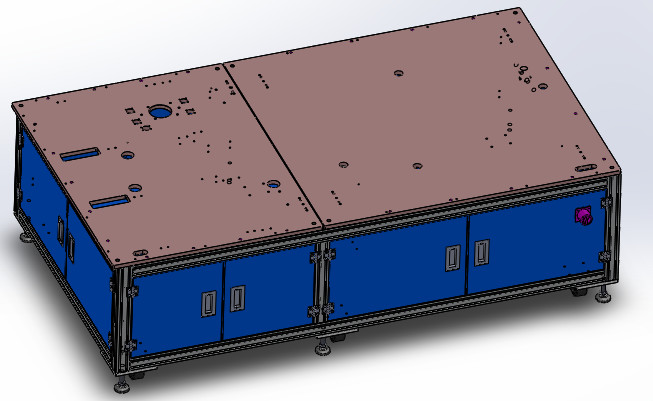
schematisches Diagramm 1,5 der Ausrüstung
Besetzungsgröße der Ausrüstung 1.5.1 (Einheit: Millimeter): 2300*1300*1500 (Länge * Breite * Höhe)
2. Hauptkomponenten der elektrische Zellumreifungsmaschine:
2,1, das Gestell
2.2.1 das Rahmensystem wird mit Aluminiumprofilen 30X60 und Teilen des Blechs A3 zusammengebaut.
2.2. Ladenstation des Tellermaterials
2.2.1 Entwurfsanforderungen
Fütterungsenergie 2.2.1.1 angetrieben durch Zylinder und zwei Fütterungskästen. Bringen Leitbleche auf die linken und rechten Seiten, Hebevorrichtung in Position,
Eine Seite wird mit photoelektrischem Entdeckungsschalter ausgerüstet
2.2.1.2-Prozessparameter: die Positionierungsbreite kann entsprechend der Größe der Batterie justiert werden. Die manuelle Fütterungsstufe ist ungefähr drei Stationen, und der Zwischenmanipulator nimmt die Fütterungsstufe
Anlagenkonfiguration mit 2.2.2 Hauptleitungen
| Die Seriennummer | Systemzusammensetzung | Die Systemkonfiguration | Die Zahl von |
| 1 | Umfüllsystem | Zylinder | 1 |
| Glatter Kurs | 2 | ||
| 2 |
Navigationsanlage (GPS)
|
Artikelpositionierungsblock | 4 |
|
Maschinell bearbeitetes Teil
|
1 | ||
| Behälter | 2 | ||
| Sammelnplattform | 1 | ||
| 3 | 升 das Aufzugssystem | Anhebender Motor | 1 |
| Satz der anhebenden Schraube | 1 |
Funktion 2.2.3: setzen Sie manuell die Batterie des Ganzstapels der Scheibenmaterialien auf den materiellen Kasten, ermittelt der photoelektrische Entdeckungsschalter, dass der Zylinder des Materials auf den mittleren Platz übertragen wird und wartet auf den Fütterungsmanipulator, um das Material aufzuheben, und die zwei Fütterungskästen verteilen die Fütterung
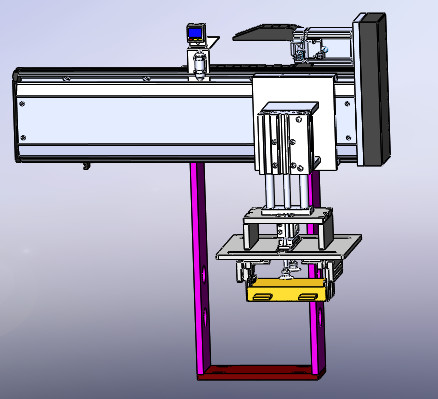
Fütterungsmanipulator mit 2,3 Batterien
2.3.2. Hauptteile Ausrüstung
2.3.2.1. Fütterungshand der Batterie: sie wird aus Servomotor, Leitspindelmodul, Näherungsschalter, Hubzylinder, Saugplattengruppe, etc. verfasst. Die Struktur ist einfach und. praktisch.
2.3.2.1 .1: Saugergruppenbewegung wird durch Servomotor des Schraubenmoduls für die genaue Positionierung gesteuert. Näherungsschalterbatterie verfügbar.
2.3.2.1 .2: das Werkstück ist bequem zuverlässig, ununterbrochen, stabil und.
Funktion 2,4: zeichnen Sie die Batterie im Behälter zum Batterieübergangsmechanismus und im leeren Behälter zum leeren Behältersammlungsmechanismus
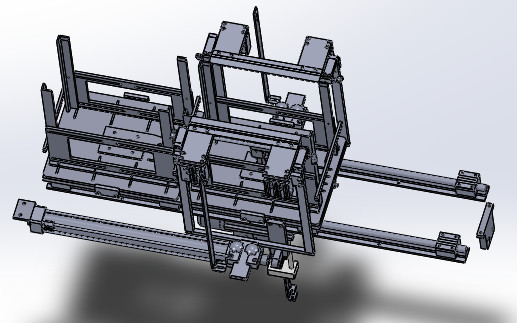
Mechanismus mit 2,4 Batterien Übergangs
24.1.1. Batteriegetriebemechanismus: dieser Mechanismus wird hauptsächlich aus dem Schrittmotor, Gurt, Klammer verfasst und bringt Zylinder, Näherungsschalter, etc. in Position.
2.4.2.1-Energiemechanismus: justierbare Geschwindigkeit.
2.4.2.2. Die Batterie wird ohne Schaden der Batterie durch die Positionierung der Werkzeugausstattung sichergestellt
2.4.2.3-Stellung der Positionierung der Werkzeugausstattung und der Batterie kann, mit der Positionierung von Genauigkeit ≤± 0.1mm leicht justiert werden
2.4.2.4-Gurtgurt-Spannmechanismus
2.4.2.5 basieren, der Mechanismus wird verfasst hauptsächlich aus Grundplatte und die Positionierung des Stiftes, den in Position bringenden Stift in Position bringend, stellen Stabilität und Zuverlässigkeit, einfache Operation sicher.
Funktion 2.4.3: übertragen Sie die Batterie vom Fütterungsmanipulator auf die Position und warten Sie auf den messenden Spannungswiderstandmanipulator, um das Material aufzuheben
2.5.1.1. Abtastmechanismus: dieser Mechanismus wird hauptsächlich aus Klammer-, Überprüfungsgewehr, etc. verfasst.
2.5.2.1-Klammerhöhe Winkel kann willkürlich justiert werden
Funktion 2.5.3: scannen Sie den qr Code auf der Batterieoberfläche, um die ursprünglichen Daten der Batterie zu sammeln und sie dem Computersystem überzumitteln.
2.6.1.1 das Gerät wird hauptsächlich aus Klammer, Hubzylinder, photoelektrische Sensor-Sonde, blockieren und so weiter verfasst.
2.6.2.1 die Klammer kann entsprechend der Batteriegröße willkürlich justiert werden
Funktion 2.6.3: stapeln Sie und bringen Sie die Zelle in Position.
2.7.1.1. Rotationsmechanismus: dieser Mechanismus wird hauptsächlich aus dem Schrittmotor, Gurt, Klammer verfasst und bringt Zylinder, Näherungsschalter, etc. in Position.
2.7.2.1-Band, das Mechanismus setzt: justierbare Geschwindigkeit,
2.7.2.2. Die Batterie wird ohne Schaden der Batterie durch die Positionierung der Werkzeugausstattung sichergestellt
2.7.2.3. Die Positionierung der Werkzeugausstattung und der Batterie kann, mit der Positionierung von Genauigkeit ≤± 0.1mm bequem justiert werden
2.7.2.4-Gurtgurt-Spannmechanismus
2.7.2.5 basieren, der Mechanismus wird verfasst hauptsächlich aus Grundplatte und die Positionierung des Stiftes, den in Position bringenden Stift in Position bringend, stellen Stabilität und Zuverlässigkeit, einfache Operation sicher.
Funktion 2.7.3: nehmen Sie zusammen die elektrischen Zellen auf, die vom horizontalen Manipulator genommen werden
Fütterungsmanipulator 2.8.1.1: dieser Mechanismus wird hauptsächlich aus Klammer, Hubzylinder, Schraubenstangenmodul, Saugdiskette, stabilisierter Stange, etc. verfasst.
2.8.2.1 die Klammer kann entsprechend der Batteriegröße willkürlich justiert werden
Funktion 2.8.3: nehmen Sie der Gurtungspositionierungsspannvorrichtungsversammlung die Batterie vom Zellübergangsmechanismus
2.9.1.1. Codeabtastmechanismus: dieser Mechanismus wird hauptsächlich aus Klammer, Codegewehr, etc. verfasst.
2.9.2.1-Klammerhöhe Winkel kann willkürlich justiert werden
Funktion 2.9.3: entsprechend den Batteriearten, die durch den Datenanalysesatz des Computersystems klassifiziert werden, werden verschiedene Codes auf die Batterieoberfläche gesprüht.
2.10.1.1. Batteriegetriebemechanismus: dieser Mechanismus wird hauptsächlich aus dem Schrittmotor, Gurt, Klammer verfasst und bringt Zylinder, Näherungsschalter, etc. in Position.
2.10.2.1-Energiemechanismus: justierbare Geschwindigkeit,
2.10.2.2. Kein Schaden der Batterie wird durch die Positionierung der Werkzeugausstattung garantiert
2.10.2.3. Die Positionierung von Werkzeugen und von Batterien kann, mit der Positionierung von Genauigkeit ≤± 0.1mm leicht justiert werden
2.10.2.4-Gurtgurt-Spannmechanismus
2.10.2.5 basieren, der Mechanismus wird verfasst hauptsächlich aus Grundplatte und die Positionierung des Stiftes, den in Position bringenden Stift in Position bringend, stellen Stabilität und Zuverlässigkeit, einfache Operation sicher.
Funktion 2.10.3: die Batterie, die vom horizontalen Manipulator genommen wird, wartet auf den zu sprühenden und an das materielle Niveau des Roboters geliefert Code
1. Neues Ausrüstungsversprechen
Unsere Firma garantiert, dass die Waren, die zu den Kunden bereitgestellt werden, nagelneue, komplette und unbenutzte Ausrüstung sind.
2. Vertraulichkeitsverpflichtung
Unsere Firma verspricht, dass ohne die schriftliche Genehmigung irgendeiner Partei, der anderen bezogenen Zeichnungen der Partei, der technischen Informationen, der Geschäftsinformations- und Sektorgeheimnisse und der technischen Geheimnisse nicht zu den Drittparteien in jeder Hinsicht durchsickern gelassen werden darf.
3. Kundendienstverpflichtung
(1) zwei Monate nach Versand der Ausrüstung, ist Partei B für nicht menschliche Störungen in einer fristgerechten und freien Garantie innerhalb eines Jahres verantwortlich (wenn die Ausrüstung fehlerhaft ist, reagiert das Kundendienstpersonal innerhalb 2 Stunden, nachdem es die Mitteilung empfangen hat. Entsprechend der Situation muss Personal innerhalb 48 Stunden existieren. Nicht später als 60 Stunden, die Kontinuität der Produktion durch den Käufer sicherstellen;
(2) nach der Ausrüstung hat den Garantiezeitraum, wenn es ein Problem gibt, die zwei Parteien sich verständigen und beschäftigen es geführt. Bei Bedarf wird Nachverkaufspersonal gesendet, um es zu reparieren, und nur die Kosten werden berechnet. Zh
(3) während des Garantiezeitraums, der im Vertrag und in der technischen Vereinbarung unterzeichnet werden von den zwei Parteien vereinbart wird, stellt die Firma eine Garantie für Qualitätsprobleme zur verfügung, die nicht durch menschlichen Schaden während des normalen Gebrauches unserer Produkte verursacht werden.













